Hand Keypoint Detection in Single Images using Multiview Bootstrapping (Dataset)
Tomas Simon, Hanbyul Joo, Iain Matthews, Yaser Sheikh
Carnegie Mellon University
Publication
Hand Keypoint Detection in Single Images using Multiview BootstrappingTomas Simon, Hanbyul Joo, Iain Matthews, Yaser Sheikh
Computer Vision and Pattern Recognition (CVPR), 2017
[ arXiv ]
Hand Dataset
Hands with Manual Keypoint Annotations (Training: 1912 annotations, Testing: 846 annotations)Download (588MB)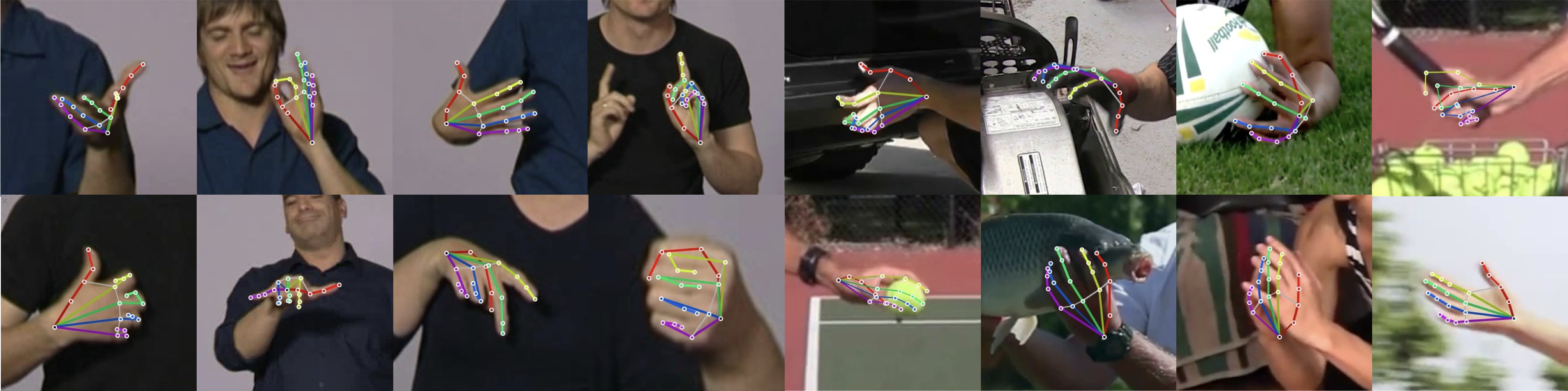
|
Hands from Synthetic Data (6546 + 3243 + 2348 + 2124 = 14261 annotations)Download (662MB)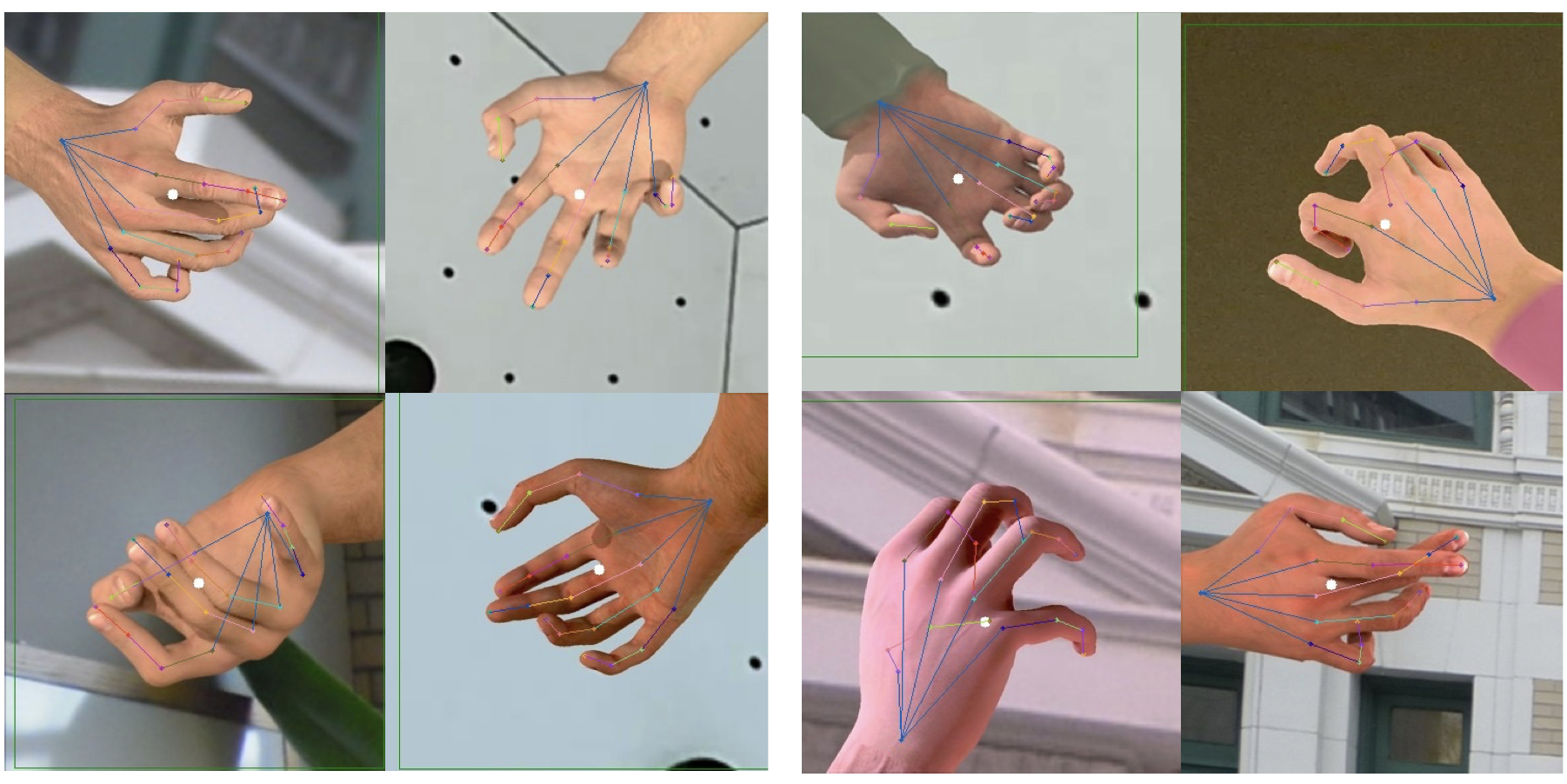
|
Hands from Panoptic Studio by Multiview Bootstrapping (14817 annotations)Download (7.5 GB)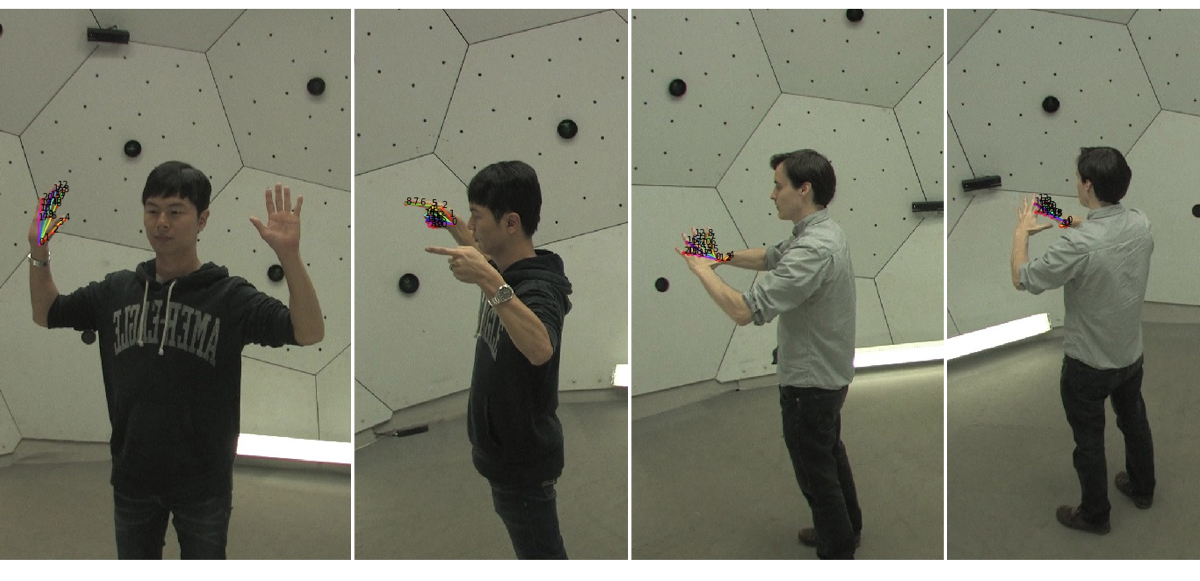
|